Here is a small Medium Post I wrote on the Instance Normalization:
The Missing Ingredient for Fast Stylization paper mentioned during Lecture 10.
2 Likes
I was working on kaggle’s jigsaw unintended bias challenge and trained my model using the techniques learned from lessons 9 and 10. Here is my solution kernel. I have tokenized with keras because I am not experienced in nlp with pytorch. I will update my kernel as the time goes on
Today I was thinking about how you might go about discovering a better learning rate schedule.
The first step in my experimentation was exploring what’s going on with the relationship between the learning rate and the loss function over the course of training.
I took what we learned about callbacks this week and used that to run lr_find after each batch and record the loss landscape. Here’s the output training Imagenette on a Resnet18 over 2 epochs (1 frozen, 1 unfrozen) with the default learning rate. The red line is the 1 cycle learning rate on that batch.
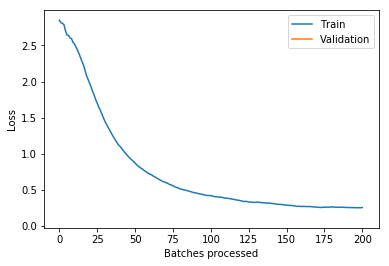
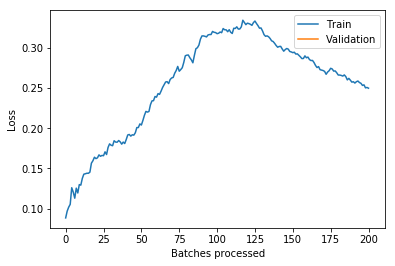
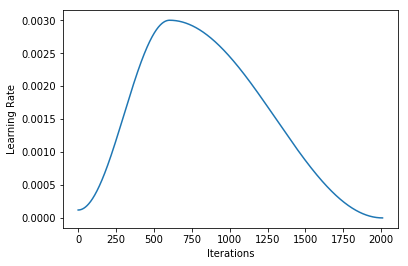
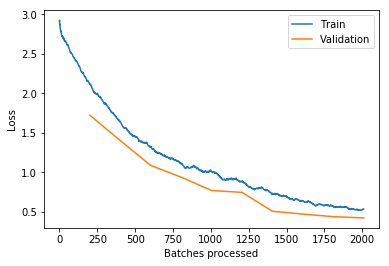
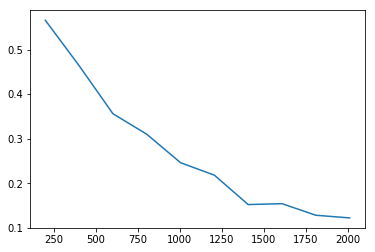
And (via learn.recorder) the learning rate schedule, and loss for epoch 1 (frozen) and 2 (unfrozen):
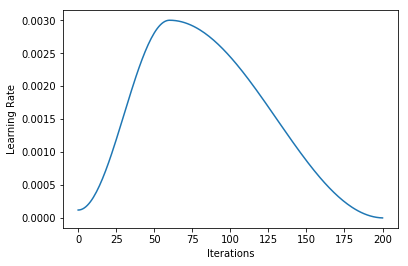
I’m not quite sure what to make of it yet. I think maybe if you could have your learning rate schedule dynamically update to stay just behind where the loss explodes that might be helpful (in the unfrozen epoch I had my LR a bit too high and it clipped that upward slope and made things worse).
Unfortunately it’s pretty slow to run lr_find after each batch. Possible improvements would be running just a “smart” subset to find where the loss explodes and to only run it every n batches.
Edit: one weird thing I found was that pulling learn.opt.lr returns a value that can be higher than the maximum learning rate (1e-3 in this case) – not sure why this would be when learn.recorder.plot_lr doesn’t show the same thing happening.
4 Likes
Great work! Note that freezing doesn’t make sense for imagenette - you shouldn’t use a pretrained imagenet model, since the data is a subset of imagenet, and it doesn’t make much sense to freeze a non-pretrained model.
2 Likes
Whoops! Didn’t even think about that. I’ll have to re-run it again with no pre-training.
Here’s an updated animation showing 10 epochs with no pre-training (one snapshot of lr_find every 10 batches).
It stayed pretty much in the zone! So maybe there’s not actually that much room to improve the LR schedule.
It looks like 1e-3 (which is what lr was set at) would have been good but it overshoots it a bit according to learn.opt.lr – not sure if this is an issue with opt.lr or learn.recorder because they still don’t seem to match up.)
LR
Loss
Error Rate
4 Likes
Great post and notebook on weight init @jamesd  Thanks.
Thanks.
I keep as summary:
- ReLU as activation function: use kaiming weight initialization
- symetric non linear activation function like tanh: use xavier weight initialization
Code:
def kaiming(m,h):
return torch.randn(m,h)*math.sqrt(2./m)
def xavier(m,h):
return torch.Tensor(m, h).uniform_(-1, 1)*math.sqrt(6./(m+h))
Note: in your for loops, you write y = a @ x. You should write y = x @ a (input x that is multiplies by the weight matrix to give the output y) I think.
5 Likes
Wrote a new blog post link. It is based on the paper Weight Standardization.
In short, the authors introduce a new normalization technique for cases where we have 1-2 images/GPU, as BN does not perform well in that cases. They also used Group Norm. Weight Standardization normalizes the weights of the conv layers. They tested it for various computer vision techniques and they were able to achieve better results than before. But they did all their experiments with constant learning rate with annealing after some iters. The main argument is WS smoothenes the loss surface and normalizes the gradient in the backward pass.
So I tested out Weight Standardization for cyclic learning. In the blog post, I present comparisons of with and without weight standardization for a resnet18 model on CIFAR-10 dataset.
But after experimenting for a day, I was not able to get better results using WS. Although, when I use lr_find it kind of shows that I can use a larger learning rate, but when I train the models the results are quite similar. I think the added cost of WS does not justify the performance and for cyclic learning is not a good choice.
Also, if someone can comment on my new blog style. I first introduced the paper, and then showed the graphs for the results. Feedback on this approach would be appreciated.
Someone with experience on Medium, I need some help. When I go to publish my post, they give us an option saying, " Allow curators to recommend my story to interested readers. Recommended stories are part of Medium’s metered paywall.". I just want to keep my blog posts free, so should I use this option.
1 Like
No definitely avoid that.
3 Likes
I modified model_summary a little in 11_train_imagenette notebook to:
def model_summary(model, find_all=False):
xb,yb = get_batch(data.valid_dl, learn)
mods = find_modules(model, is_lin_layer) if find_all else model.children()
f = lambda hook,mod,inp,out: print(f'{mod}\n{out.shape}\n------------------------------------------------------------------------------')
with Hooks(mods, f) as hooks: learn.model(xb)
then did model_summary(learn.model, find_all=True)
now it prints out the modules and the out shape:
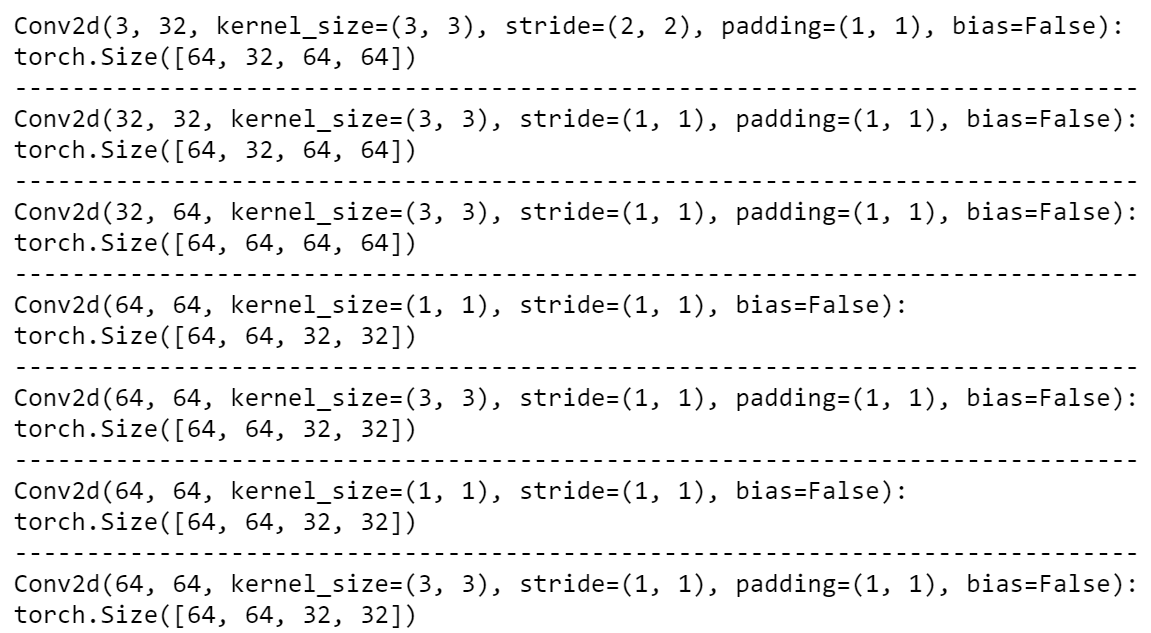
Or
model_summary(learn.model):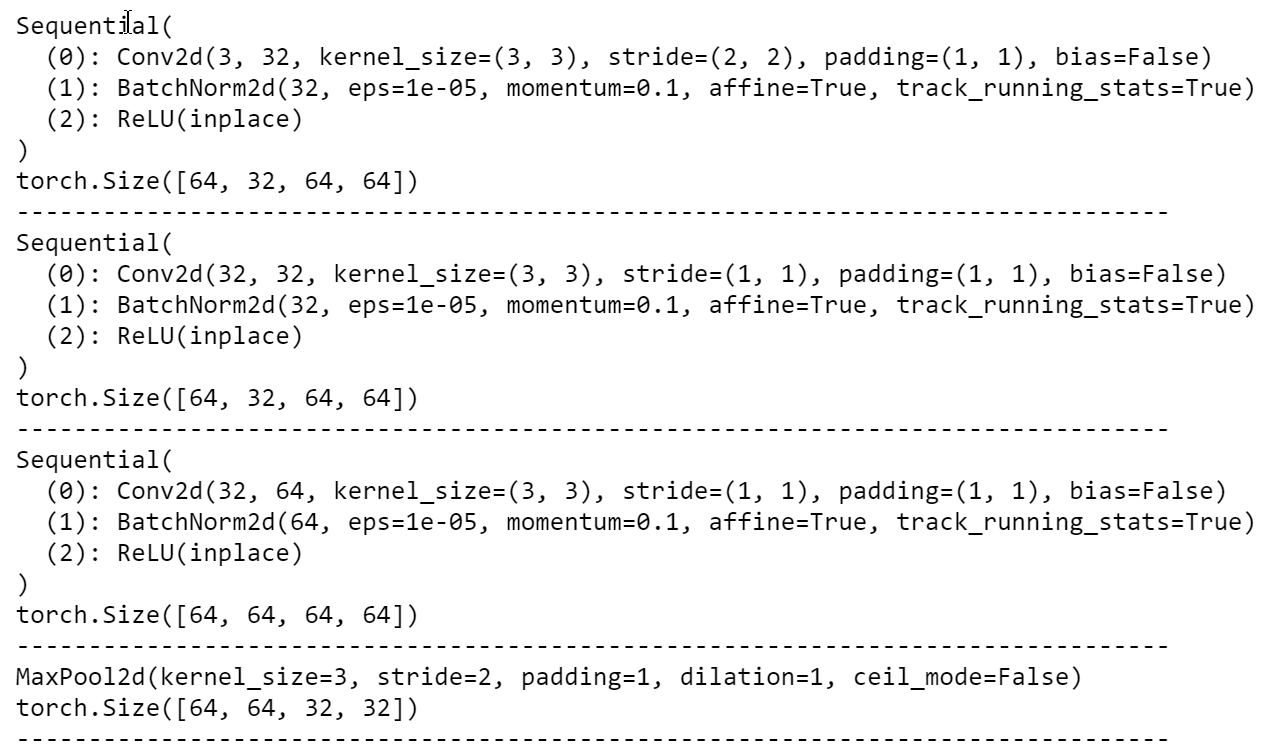
I thought it was helpful to see in one place how the modules were changing the out shape so I thought I’d share it!
2 Likes
Great minds think alike - that’s what the summary in nb 08 does too! ![]()
FYI you can write this more conveniently as:
f'{mod}\n{out.shape}\n{"-"*40}')
2 Likes
Here is a small Medium post summarizing the BERT training using LAMB paper that was introduced during Lecture 11.
As always, corrections and comments improving the style and content are welcome.
1 Like
Hey, tired of reading how everything went right? Want to see a bunch of AC/DC references shoved into an article?

That heatmap can’t be right at all!
4 Likes
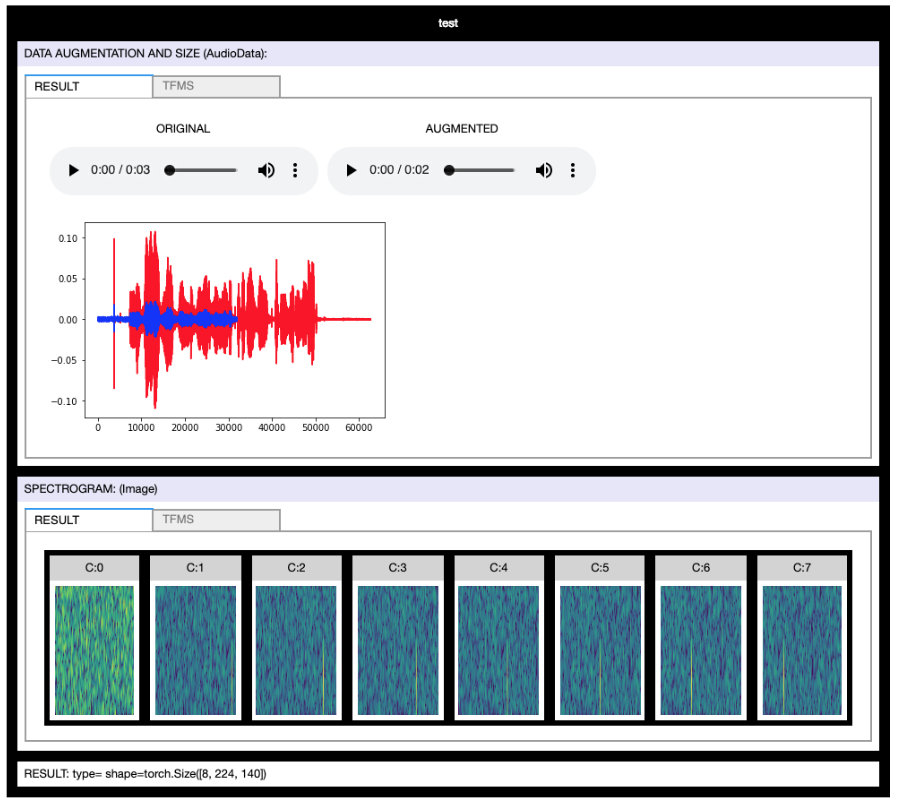
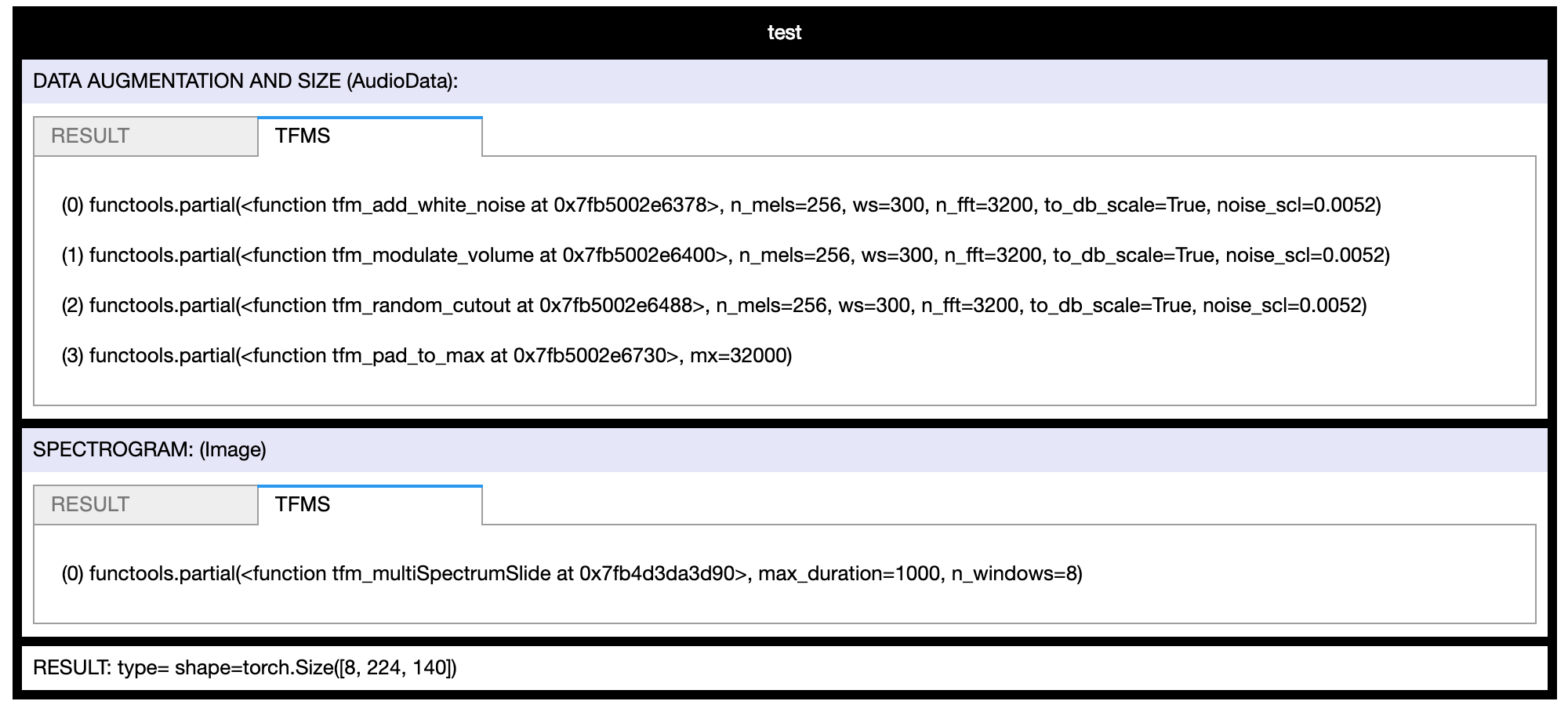
TfmsManager: visually tune your transforms
I’ve published a tool to quick visualize and tune a complex chain of data transforms (Audio & Image).

15 Likes
Ever since getting into deep learning, and making my first PR to pytorch last year, I’ve been interested in digging into what’s behind the scenes of the python wrappers we use, and understanding more about what’s going on at the GPU level.
The result was my talk " CUDA in your Python: Effective Parallel Programming on the GPU", which I had the chance to present at the PyTexas conference this past weekend.
I would love any feedback on the talk, as I’m giving it again at PyCon in ~3 weeks.
15 Likes
Google colab template (link) - exported stuff taken care of so you can pretend you have a local jupyter with all the prev lessons.
3 Likes
When the development began last fall on Fast.ai 1.0, I decided to try to write my own version in Swift so that I could learn more about how Fast.ai is put together and try to demystify the things that it does as well as learn Pytorch better. Also, it would allow me to continue practicing my Swift skills. Since a couple of the Part 2 lessons are going to be using Swift, I thought I’d share what I’ve created so far for anyone here who is interested. I thought it might be useful for those who want to see how things like callbacks, training loops, closures, etc. can be done in Swift as well as how to run Python and Pytorch code from within Swift. I’ve created a Docker setup for it for ease of installation as well as some examples that can be run. Those are: MNIST, CIFAR-10, Dogs Vs. Cats Redux (Kaggle), Kaggle Planet competition and Pascal VOC 2007. You can also submit the output to Kaggle for the 2 Kaggle competition ones. I’m going to try to add to the readme on how things are architected but for now it just has installation instructions and how to run the examples. Also, unfortunately it only supports CPU for now. Here’s a link to the repo https://github.com/sjaz24/SwiftAI
7 Likes
Thanks @stephenjohnson! Would love to hear if you see anything in our dev_swift notebooks that you think could be improved based on your experiences.
I think the medium link might be broken. It won’t let me click it