I ask this because I have trained a model based on the paper–Deep image homography estimiation, results looks very great on train/test set.
I generate the test set with the same solution introduced by the paper, but instead of generate images with size 256256, I generate the images with size 128128.
After that, I measure the loss as the sqrt of l2 loss
avg sqrt L2 loss of training set(500032 images from image net) : 0.8967
avg sqrt L2 loss of test set(10000 images from image net) : 0.8448
avg delta of test set(how many pixels different with the real delta) : 2.48
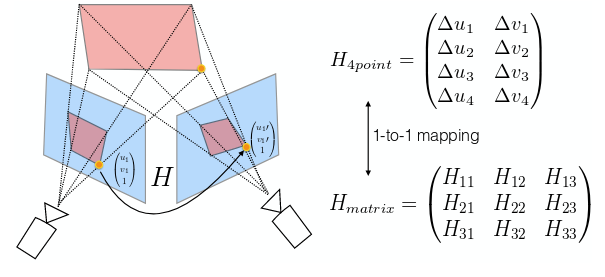
I read those articles previously. The problem for me is that when I receive the output from the trained system I only have the 4 point parametrization matrix and I dont know any point in the image I am trying to discover the homograpy matrix. Maybe I would have to infer 4 points? I am not quite sure
Maybe I didn’t understand correctly. From your model, you have the parametrization matrix. Is this correct? If so, then what are you looking for after this?
First I tought it would be as simple as this, but no it is not. The output is composed by the deltas. The only way I see I could start from deltas and get te original points is if I already knew the distance bettwen them, but this is not true. Event though, assuming I know that, it would be a little complex to get the correct points.
I am really stucked. I am thinking about proportions, but I guess this is not the answer too.