If the output can be computed from the input using some deterministic equation it shouldn’t be hard to train a U-Net model in regression mode to map the input to the output. Or do you mean a model to do forecast for the future?
1 Like
Doing something similar now but on the scale of a city/district. The way you’ve explained it, it seems like an image-to-image translation in a single domain context with paired data. The state of the art in this case, at least in my experience, is still pix2pix. I’d go with that for my first try, I’ve had very good results so far in my cases.
3 Likes
Dave thanks for sharing your work man, pretty amazing stuff!
I wonder if you’ve done any work on height prediction/calculation. The things we can tackle with these models, e.g. solar panel location as you point out, require knowledge about heights and self/context shading impacts.
I had this bookmarked a while back, but never went there: https://github.com/MISS3D/s2p. Wonder if you’ve had any experience? I am not sure this can be done as a prediction task, since the input required would already be enough to produce heights. Not sure though, as I’ve never tried.
Kind regards,
Theodore.
1 Like
The outputs are solutions to some Helmholtz equations. In this case, they are to do with the evolution of tropical cyclones, so there is a bit of a forecast element in it, but I think in numerically solving the equations, only a couple of time steps before and after are taken into account. Currently, the numerical solution is not stable; it sometimes diverges, so my colleague was wondering if it’s possible to just train on examples where the solution is ‘nice’.
1 Like
From Shapefile + Satellite Data to Supervised Classification
Hey guys, I’ve recently posted a question relevant to this group. ^^
The title is the link  would love some input !!
would love some input !!
3 Likes
I can’t tell if it would work, but maybe it worth trying! As long as the input data has enough information to produce the output it should be possible to train a model to perform the task.
2 Likes
Some friends and I are thinking about creating an object detection dataset for industrial tanks using Google Earth Pro. Does anyone here know or have resources on best practices for this sort of thing?
Some things on our mind:
What’s the best way to standardize the scale of the images?
If we want the data to be RGB images, is there any advantage to signing up for Google Earth Engine?
Is there a way to save metadata with an image? Specifically high accuracy coordinates of the four corners of the image.
What other location information would be useful to save?

1 Like
In Google Earth Engine you can export images as georeferenced tiff. And to create the annotations this topic has some suggestions: Image annotation tool
3 Likes
- Usually no data is not a specific class, it is just no output. That is why you should look at the output of the network before the softmax. Jeremy stated correctly that creating a class for “background” is always a bad idea, as the network detect features in images, no the absence of.
- For your particular task, I would look at the kaggle Planet Dataset and try to reutilise some of it, there is a huge amount of data, correctly labeled. We had at my old lab a manually crafter ArcGis database of the region of Grenoble with polygons describing the categories you look for.
- Try the Fiji app.
- Use focal loss type/ oversample the hard classes.
- If your training data has this type of example, yes.
1 Like
I don’t know much of anything about physical climate modeling but did attend a conference session at AGU 2018 about this topic out of curiosity to see what folks were working on. From my naive understanding, this work looks similar to what you’re asking about?:
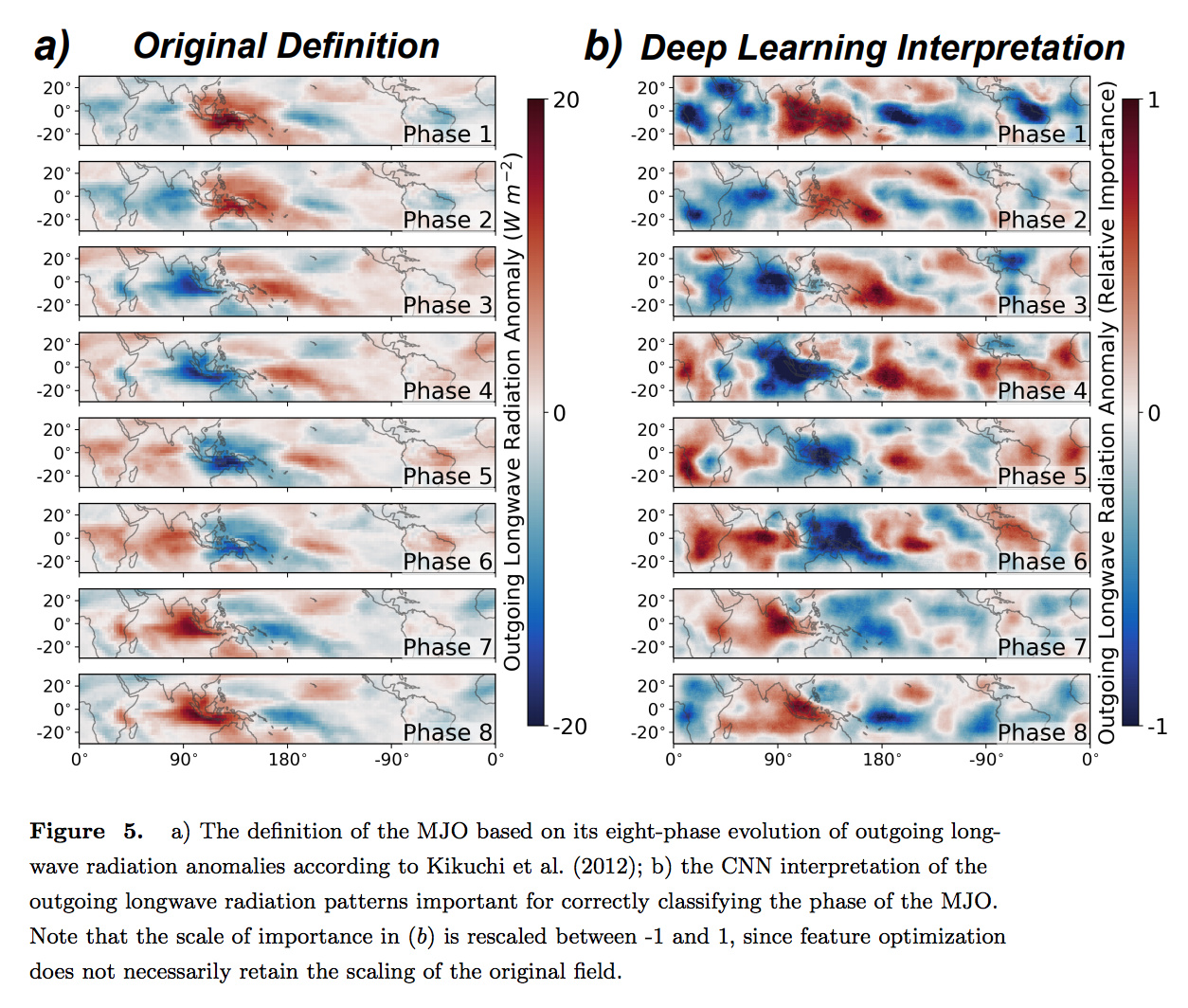
Here were some of the relevant talks and poster sessions you could search the titles/authors of if interested to delve deeper:
https://agu.confex.com/agu/fm18/prelim.cgi/Session/60553
https://agu.confex.com/agu/fm18/prelim.cgi/Session/49601
For picking a standard scale, I’d recommend picking one of the zoom levels that visibly gives you good resolution and pixel-wise balance of the object of interest (industrial tanks) vs background.
Slippy map tile convention zoom levels: https://wiki.openstreetmap.org/wiki/Slippy_map_tilenames#Resolution_and_Scale
Zoom levels are used by Google Earth/Maps to determine the scale anyways: https://developers.google.com/earth-engine/scale
And if you use a tile server, you can direct get tiles at a specific zoom level which is already squares (usually 256x256, or 512x512 for “retina” tiles) following a standard z/x/y numbering system that converts back and forth to geographic coordinates: https://wiki.openstreetmap.org/wiki/Slippy_map_tilenames#Python
As mpinto suggests, you can export/save images as geotiffs which contain the bounding box coordinates, coordinate reference system, and band-by-band details in the file metadata. Or if using map tiles, you already have the bounding box coordinate conversion in the tile numbering and then you can save the individual tiles as jpgs or pngs.
Re: annotation, rather than use a generic labeling tool, for geospatial data I would recommend drawing the polygons as geojson shapes which saves the geo-coordinates (which you can do interactively within Google Earth Engine: https://developers.google.com/earth-engine/playground#geometry-tools) and then convert the geojson shapes at a subsequent step into relative pixel display coordinates.
CosmiqWorks (the SpaceNet folks) recently released some utilities just for these geoML preprocessing purposes: https://github.com/cosmiq/cw-geodata
1 Like
Agreed with thomas!
On Q2:
The Planet dataset on Kaggle is tasked for tile/chip-wise multi-label classification. For land use/land cover (LULC) multi-class segmentation, the Kaggle DSTL one is good but small and there’s the DeepGlobe LULC challenge dataset which is 803 RGB 50cm satellite images (2448x2448) labeled for segmentation to 7 classes.
Re Q3:
You could also convert pixel-level predictions to Shapely shapes/GeoJSON file, edit these interactively, then convert the corrected shape back to pixel mask. Not perfect but editing the vertices of polygons is probably faster and simpler than doing it at a pixel level.
Re: Q4 of imbalanced classes, besides focal loss which could work well, you could also try a combined loss that includes something like dice score to penalize “global” mistakes and is less prone to the model guessing just the majority class. You could also oversample by generating more or copying (+ data aug) training images that contain your minority/hard class.
1 Like
I found this post quite useful, with the correspoding geospatial/segmented dataset.
1 Like
Hello Folks,
I am planning to explore geometric deep learning with special focus to airborne lidar point cloud segmentation and 3d reconstruction kind of work.
After few searching thought of trying PointCNN and Superpoint Graphs etc models on lidar las files.
Initially i am stuck in understanding the data pipeline to feed into this network. Look forward to help from the community.
Thanks,
Sayak
1 Like
For anyone who’s looking for an interesting challenge. Our non-profit research group openclimatefix.org is working to map solar PV globally using ML: http://jack-kelly.com/blog/2019-07-09-solar-pv-mapping
There are several groups mapping different areas. But there is lots of help needed to map small roof top solar panels. For example in the UK we have found access to 25cm aerial imagery, and in the USA there are a few groups doing this. There is also a global utility scale dataset being released soon.
But we haven’t got any other countries in progress! If you’d like to have a go at solar PV detection (mainly small roof top panels) using ML for a particular country, we invite you to.
The biggest hurdle is usually imagery. We’ve found Mapbox has high resolution global coverage, but for many countries the quality is too low. So it’s worth exploring domestic satellite and aerial imagery providers. Some may be open to giving access to data for educational or research purposes.
Please pay particular attention to imagery licensing. We want to be able to aggregate and freely distribute PV panel maps for research and impact climate change. This includes pushing results to OpenStreetMap. For example, results derived from Google Maps imagery cannot be openly distributed. But Mapbox explicitly states you can use their imagery to improve OpenStreetMap.
There is some great code to base your work on, such as:
http://web.stanford.edu/group/deepsolar/home
Using DeepSolar with Mapbox: http://openclimatefix.discourse.group/t/solarpaneldatawrangler/26
SolarMapper https://arxiv.org/pdf/1902.10895.pdf
I’d you’d like to chat just drop me a DM twitter.com/dctanner
6 Likes
Thanks @dctanner for posting this opportunity! I’ve added your links to a new Opportunities section at the top wiki post with other new resources and links. Please feel free to add/edit the wiki directly with more information.
Another great place to find and make use of open-source overhead imagery, especially drone/aerial imagery which works well for roof-top solar is at:
All imagery hosted there should be CC-BY-4.0: http://openaerialmap.org/about/
Random question for those who are experienced with geospatial data. I’m interested in making a model to detect topes (pretty giant speed bumps all over Mexico) from satellite images. Before I dig deeper, is this possible from satellite or are the objects going to be too small to be detectable? (They are often colored but the most interesting ones would be uncolored). Sorry I haven’t done my homework on this one but I would rather hear if it’s possible before going down another rabbit hole. Thanks.
Spot 6 & 7 (https://eos.com/spot-6-and-7) got 1.5 m resolution, but I guess you would need to check a few examples to see if it is really feasible. I guess the uncoloured ones may be a problem to see from above.
It’s a kind of task that would be easier using data collected from cars, like Tesla’s that have cameras and sensors recording all the time. Or another way around, for an app like google maps or a similar one with a high number of users, by allowing users to input the information of where there is a bump.
Thanks, yeah allowing users to input information is our ultimate solution, especially because topes come and go, but we had the idea to bootstrap with satellite data to capture maybe 20-40% of them to make the app somewhat useful to begin with. Otherwise it’s hard to get users to input.
Hi everyone,
I’m in the process of creating a fully self-contained Colab notebook to demonstrate an end-to-end workflow for building segmentation from overhead imagery. This means covering not only the DL model training and inference part but also all of the less-covered steps and interstitial stuff to go from data creation to model creation to inference on new imagery to evaluation against ground truth.
This is very much a work-in-progress and still incomplete but I’m happy to share with you this earliest version for your feedback. v1 of blog & notebook is published on 7/25! It is set up to be fully executable in Google Colab either from beginning to end or within each workflow section/step independently. Package dependency installations are all working as of 7/25 and I tried to include download links to the generated artifacts at each step so you can pick up and start from any point:
Updated 7/25, published Medium post:
Updated 7/25, published Colab notebook v1 link:
Any feedback about the post or notebook is much appreciated! DMing me here or commenting on Medium/github both work. Much thanks!
Some highlights:
-
Added 7/22: Wrote much more commentary explaining each major step with references to learn more.
-
Added 7/22: demo’ing SpatioTemporal Asset Catalogs and browser for visualizing geospatial datasets for ML:
-
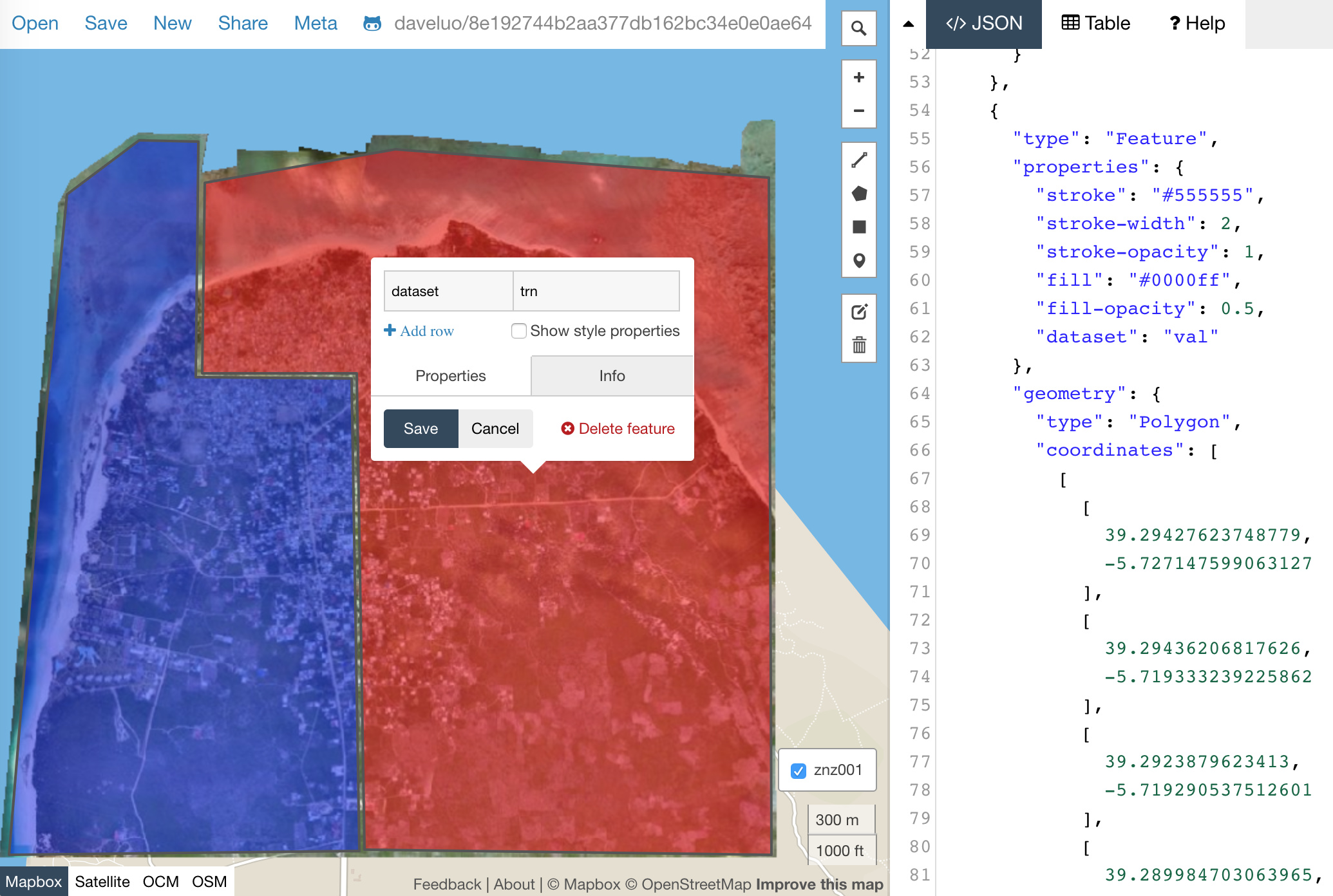
Updated 7/18: creating complex-shaped training and validation AOIs with geojson.io:
-
Updated 7/22: checking & removing overlapping tiles between train and validation:
-
Added 7/18: cleaning up invalid and overlapping geometries
-
tiling geoTIFFs and geojson files to create image and mask pairs in 3 channels with supermercado, rio-tiler, geopandas and solaris:

-
customizing fastai’s default segmentation approach to handle 3-channel target masks:
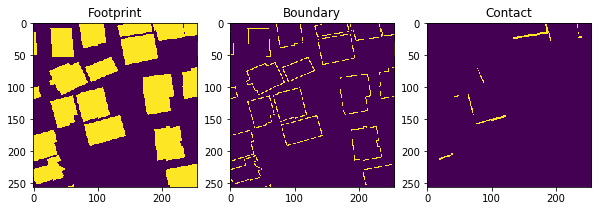
-
Updated 7/18: custom loss functions and metrics combining BCE, Focal Loss, Dice Loss or any other loss function with adjustable weighting by loss function and by channel:


class MultiChComboLoss(nn.Module):
def __init__(self, reduction='mean', loss_funcs=[FocalLoss(),DiceLoss()], loss_wts = [1,1], ch_wts=[1,1,1]):
super().__init__()
self.reduction = reduction
self.ch_wts = ch_wts
self.loss_wts = loss_wts
self.loss_funcs = loss_funcs
def forward(self, output, target):
# pdb.set_trace()
for loss_func in self.loss_funcs: loss_func.reduction = self.reduction # need to change reduction on fwd pass for loss calc in learn.get_preds(with_loss=True)
loss = 0
channels = output.shape[1]
assert len(self.ch_wts) == channels
assert len(self.loss_wts) == len(self.loss_funcs)
for ch_wt,c in zip(self.ch_wts,range(channels)):
ch_loss=0
for loss_wt, loss_func in zip(self.loss_wts,self.loss_funcs):
ch_loss+=loss_wt*loss_func(output[:,c,None], target[:,c,None])
loss+=ch_wt*(ch_loss)
return loss/sum(self.ch_wts)
-
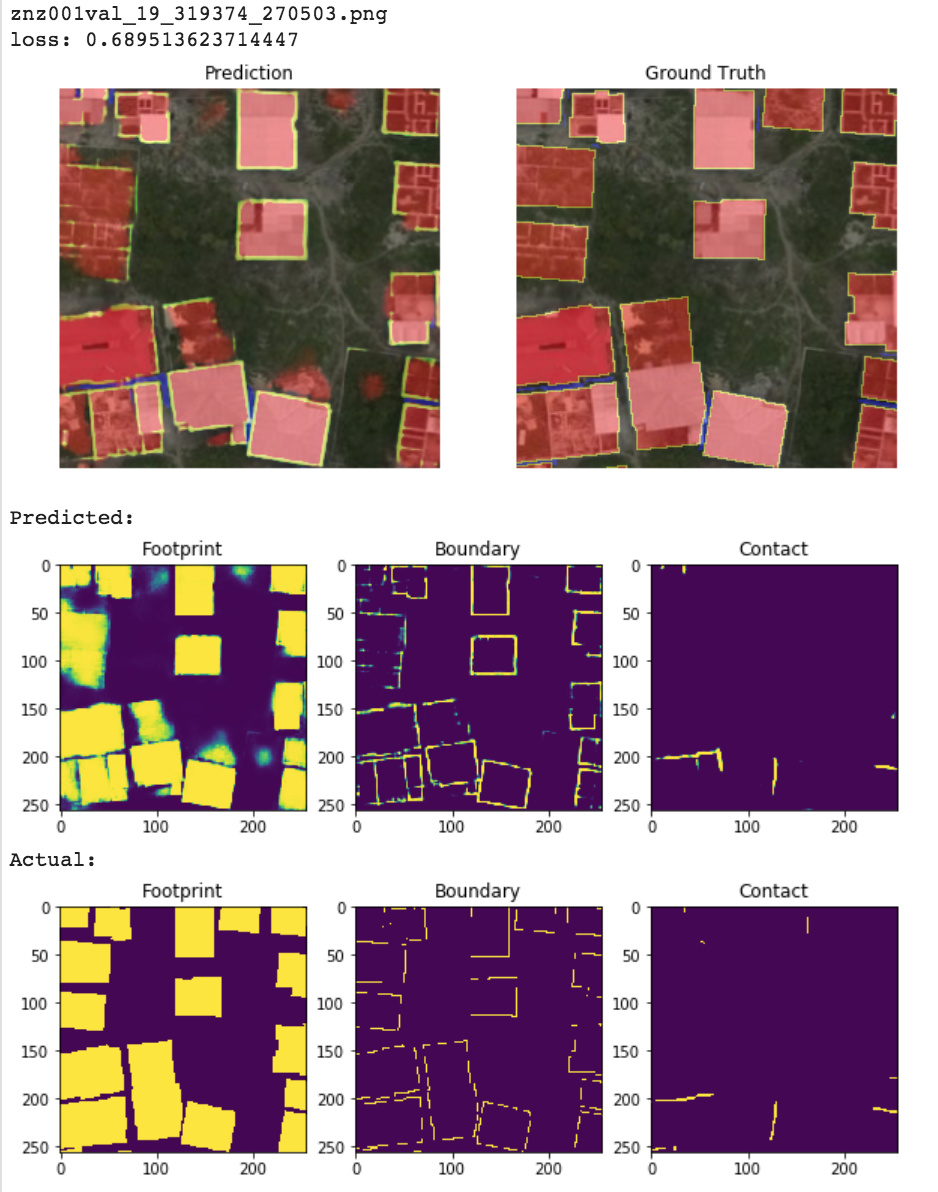
Examining segmentation results sorted by image-wise loss:
-
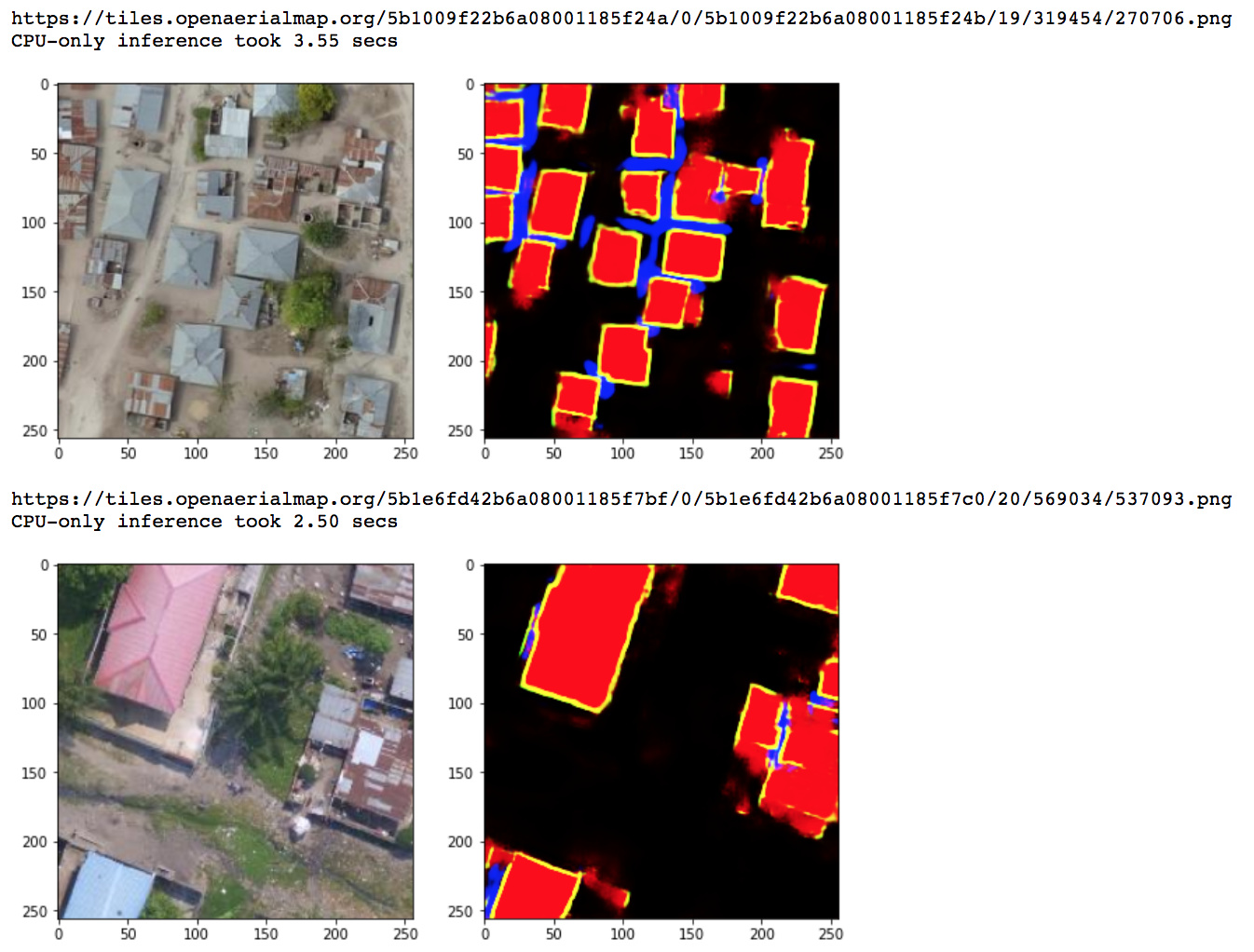
Updated 7/18: Exporting model and reloading for inference on new unseen imagery with time tests on CPU vs GPU:
-
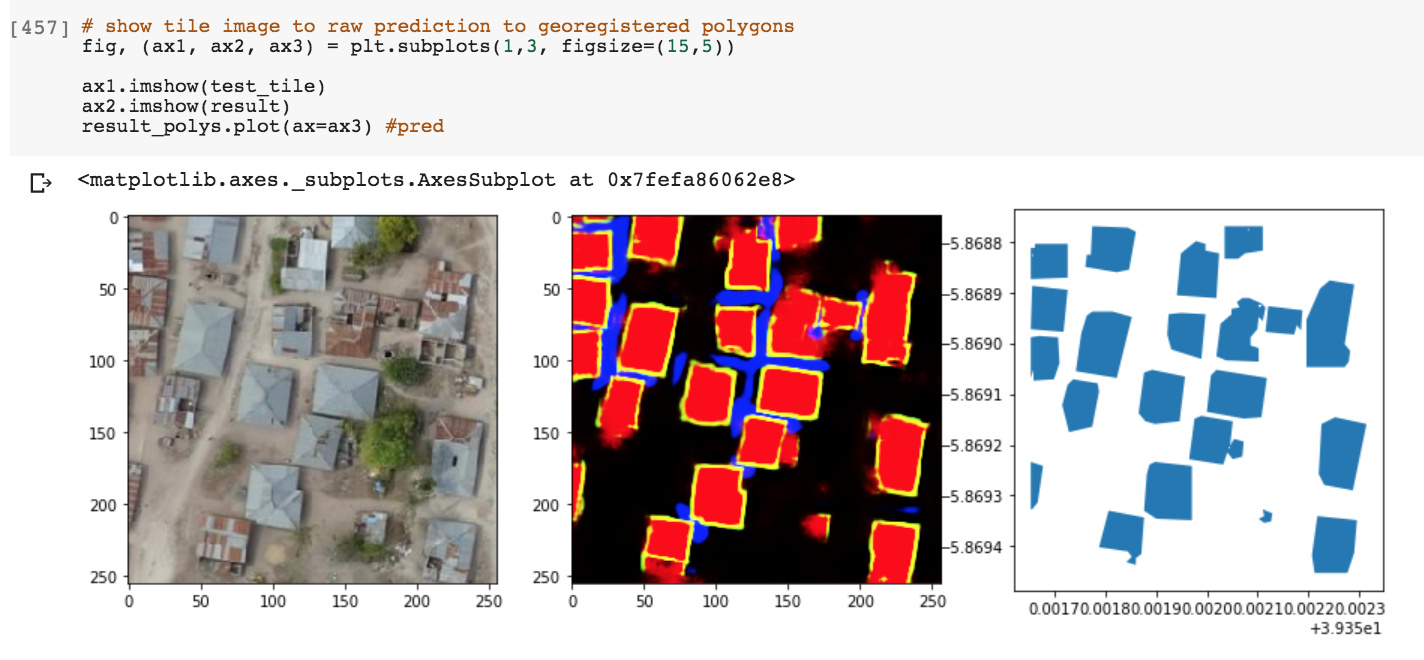
Added 7/19: Threshold, polygonize, and georegister a segmentation prediction result with solaris:
-
Added 7/19: Evaluate a predicted tile against ground truth (TP, FP, FN, precision, recall, F1 calculations) with solaris:

Much thanks to the creators and contributors of these newest and greatest geospatial tools which I’ve used extensively here:
- Geopandas: http://geopandas.org/
- Rasterio: https://github.com/mapbox/rasterio
- Solaris: https://github.com/CosmiQ/solaris
- Rio-tiler: https://github.com/cogeotiff/rio-tiler
- Supermercado/Mercantile: https://github.com/mapbox/supermercado
- Cloud-optimized geotiffs (COG): https://www.cogeo.org/
- Spatio-Temporal Asset Catalogs (STAC): https://stacspec.org/
- OpenAerialMap: https://openaerialmap.org/
- Fast.ai!
I look forward to hearing your feedback on what parts are not working, could be made clearer and cleaner, or steps I missed or should explain in more detail. The notebook currently sits as a secret gist but the plan is to polish and publish the Colab notebook(s) into a public and open-sourced repo after incorporating your initial feedback. I’ll also write an accompanying blogpost to help guide folks through it. Done!
Also to note: the focus of this notebook is to demonstrate a workflow so I did not extensively train the model or do much to optimize the segmentation results itself. There is much performance to be gained!
Dave
26 Likes