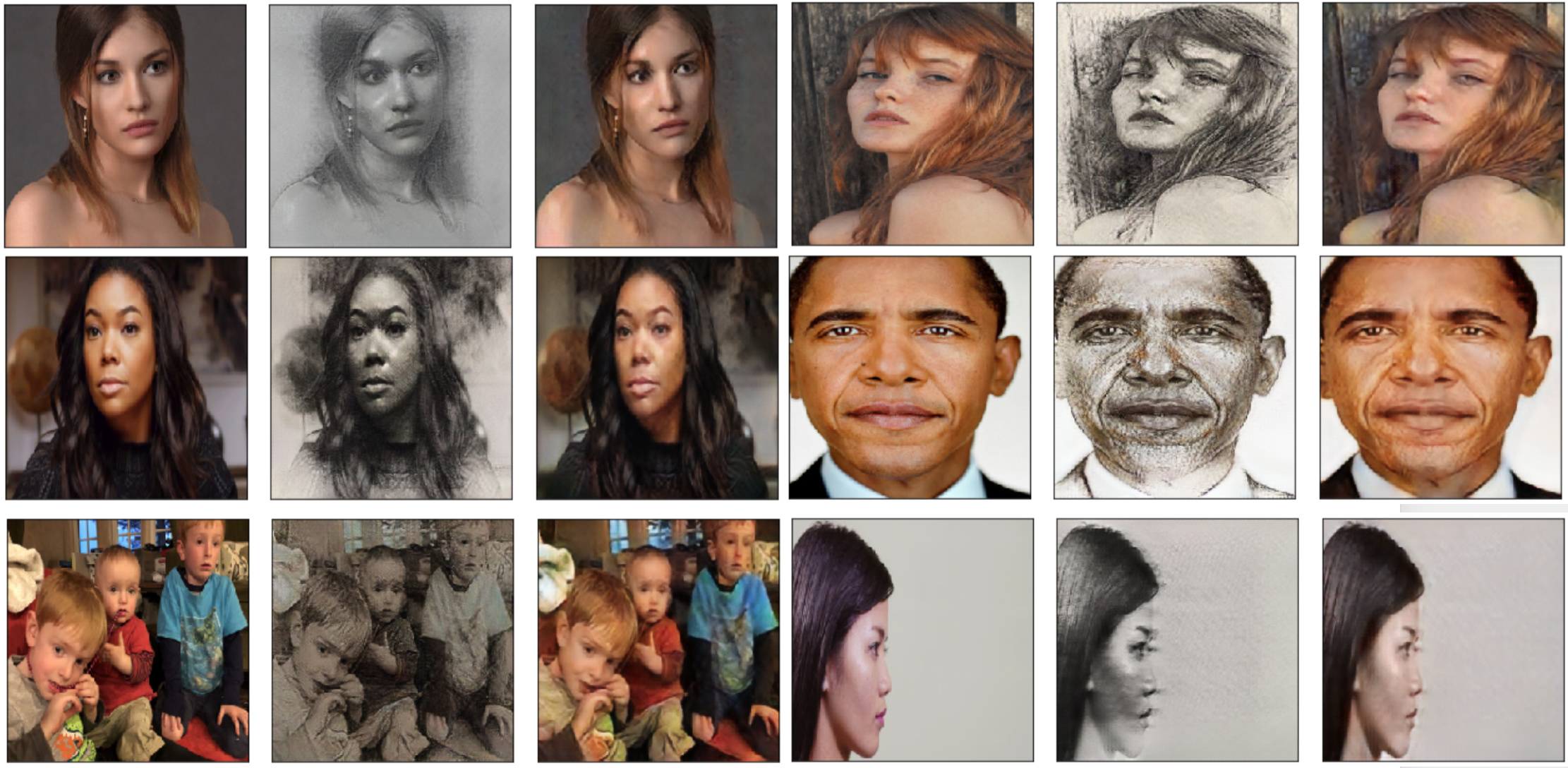
In case this is of interest, here are results of some experiments in Cycle GAN and art generations I ran: here