I am training a model for end to end driving, i.e., predicting steering angles using images. I followed NVIDIA’s pilotnet architecture.
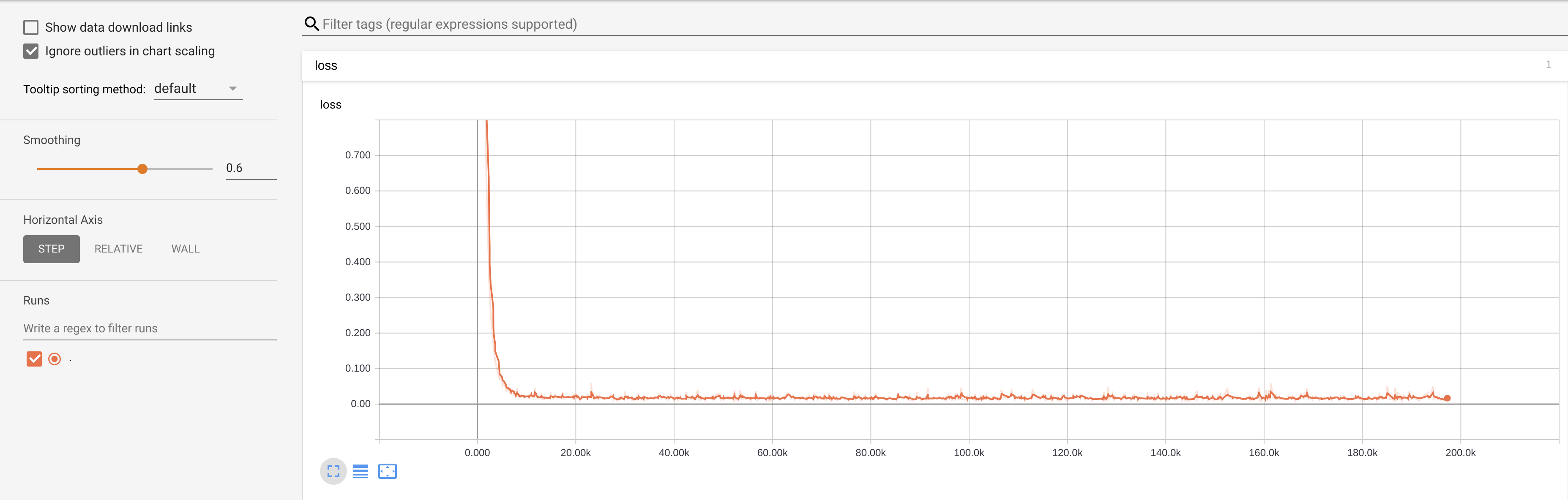
I know that loss should decrease, but in the end, it fluctuates between 0.01 - 0.05. I don’t know reason for this. I have searched SO, but was not able to find anything.
I have trained my network for 30 epochs, with batch size 100 and my training images are 675600.
It looks like the model trains quickly. One reason for the fluctuation could be that different images are in each minibatch – why would you expect the error to be identical for each subset of images?